Introduction
The Automounter is an automated cryogenic crystal mounting system that is aimed at high-throughput macromolecular crystallography by increasing experimental efficiency and reliability. Automounters are available on all BCSB beamlines. On beamlines 5.0.1, 5.0.2, and 5.0.3, the system is an ALS-style robot. On 8.2.1 and 8.2.2, the system is a Rigaku ACTOR robot.
Pucks and Tools
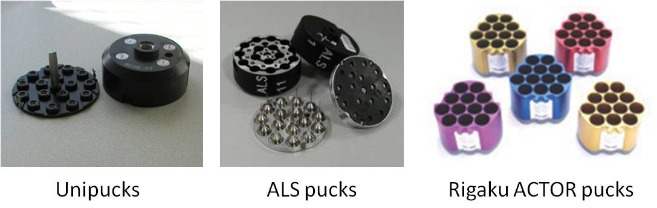
The automounters consist of a robotic arm to place pins on the goniometter, and a dewar to hold the crystals, where they sit in “pucks”. The sector 5 robots take both the ALS-style pucks and Unipucks. These pucks hold 16 pins each. On 5.0.1 and 5.0.2, there are 12 puck slots in the robot dewar, and on 5.0.3 there are 6 puck slots. The 8.2.1 and 8.2.2 Rigaku ACTOR robots take the ALS-style pucks, the Unipucks, and the Rigaku-style ACTOR pucks. The Rigaku pucks hold 12 pins each, and there are 5 puck slots in the dewar.
The ALS pucks and Unipucks require puck tongs (used for holding pucks or transfering pucks from dewars), a puck pusher tool (used to load pucks into the dewar at the beamline), a puck wand (used to put the lid onto the puck), a puck separator tool (user to remove the lid from the puck), and a shipping cane (used to ship pucks to/from the beamline).

Pins and Bases
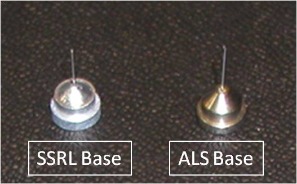
The best bases for the BCSB automounters are the Hampton Part Number HR4-779 “Crystal Cap Magnetic ALS” or the Mitegen GB-B1A. Spine bases (CrystalCap HT) do also work. Note that these bases are different from the bases used in the SSRL automounter.
The only length of pin that can be used with the BCSB automounters are “Hampton 18 mm” pins (this corresponds to breaking off the two end segments of a Hampton pin) and “Mitegen 18 mm SPINE” pins.
The dimensions are fairly critical here, and the most important one from the automounter’s standpoint is the distance from the inside mounting surface (which corresponds with the top of the goniometer magnetic mount) to the center of the crystal = 20.3mm ± 1mm.
It appears that the SSRL-style pins with the copper stem do not work well with our off-axis coldstreams. They work after an initial mount of the crystal, but subsequent dismount/remounts seem to result in excessive crystal warmup.
Ordering
Unipucks, ALS Style Pucks, shipping canes, and puck tools can be purchased from Crystal Positioning Systems.
The Unipuck tools are the same as the ALS puck tools. (Note that they are called “V1 Unipucks” on the Crystal Positioning site.)
The Rigaku ACTOR pucks, puck tools, and shipping canes can be ordered from Rigaku.
Bases can be ordered from either of the following suppliers: Hampton Research (order HR4-779 “Crystal Cap Magnetic ALS”) or Mitegen (Part Number GB-B1A)
Pins without bases can be ordered from Hampton Research or Mitegen. They come in a variety of sizes. Sample Hampton part numbers are HR4-993 (10 micron loops) and HR4-941 (20 micron loops. Mitegen sells a variety of loop and mesh styles.
Loading Pins into Pucks — ALS and Unipucks
The NSLS has made an excellent video on how to load pins into the ALS pucks and Unipucks. It can be found here.
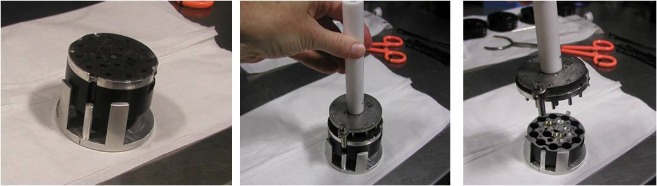
Put a puck cap with the holes up into a small dewar filled with LN and let it cool down.Using the magnetic wand to hold the pin base, scoop out the crystal from the well (or drop of cryoprotectant) and put it straight into the puck. Be sure to keep track of which crystal goes into which position. To close the puck, hold the magnetic puck base with the puck wand, and push the base into the puck. Once the center pin of the base is in the puck, move the base rapidly in, otherwise the magnet in the base might pick up the pin bases and pull them out of the puck. Make sure the base snaps in properly.
The ALS and Unipucks have small clips holding the base to the cap. It is important to make sure these clips are secure but not protruding. If the clips are bent out, it is very difficult to get the shipping cane in or out of the shipping dewar. If the clips are very loose, there is the danger that the puck base will fall out of the cap during transfer from the shipping cane to the robot dewar.
For getting the pins back out of the ALS pucks, you can use the puck separator tool. Under LN, place the puck in the separator holder, then insert the puck separator into the base and press down:
Loading pins into pucks — Rigaku ACTOR Pucks
Beamline 4.2.2 staff at the ALS have made an excellent video on loading Rigaku ACTOR pucks, and it can be found here.
For the Rigaku pucks, you can use the bent pin tongs to load the pins as shown below. Care should be taken to insure the pin is in contact with the base before releasing the pin. In the middle picture below, there are pins sitting in positions 1 through 6 of the puck.
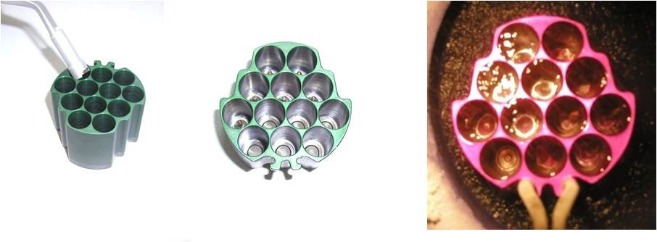
It is very important to check the seating of your pins when using Rigaku style pucks. The easiest way to accomplish this is to visually inspect the puck by lifting the puck top above the liquid nitrogen level and shining a flashlight on it. This provides a clearer view into the base of the puck and should allow you to see any improperly aligned pins. If it is difficult to see the pins, look for symmetry in the reflectivity of the pins. A tipped pin will often look shadowed and asymmetric. In the right photo above, pins 2, 5, 8, 9, 11 and 12 are improperly mounted.
If a pin is tipped over the easiest and safest way to reseat it without harming your crystal is to use a straight probe about the diameter of a wire coat hanger to reseat the pin by gently pushing on the top of the pin base opposite to which the pin is leaning. The pin should “snap” firmly onto the base when straightened. The ACTOR pin check tool can also be used, but a visual inspection is preferred and generally more reliable.